Occupancy Networks: Learning 3D Reconstruction in Function Space¶
阅读 IF-Defense 遇到占据网络的概念,在此记录相关内容。
在对抗攻防中,防御方发展出一类基于输入净化的方法,通过将对抗样本恢复为良性样本来实现防御。IF-Defense ---一项点云对抗防御中的经典工作---正属于这类方法。它先将点云重建为网格,然后在网格层面消除异常的形变,从而实现防御。而 IF-Defense 所使用的曲面重建方法是这篇论文所提出的占据网络。因此,为了更好的理解 IF-Defense 的方法和代码实现,特在此记录相关内容。
论文信息
背景¶
不必要的背景介绍在此省略,Related Work 还有实验也一并省略,这些不是本文关注的重点。
三维表示形式不统一¶
与二维视觉中不同的是,在三维视觉中,研究人员尚未在“用什么形式表达三维信息” 这一问题上达成共识。很难说一个理想的三维数据表示形式是什么样的,因为现有的表示各有优劣,没有一种形式能完全盖过一切。不过,我们可以分析现有的数据表示有什么问题,然后看看能否改进这些问题,从而接近那个“理想的形式”。
现有表示形式的缺陷¶
现有的三维数据表示形式大致可分为三类:基于体素的表示、基于点的表示和基于网格的表示。
基于体素的表示是 2D 图像像素到 3D 情况的推广。 这种表示最直接的问题是内存占用随着分辨率的提高呈立方增长。虽然可以通过一些自适应技术(如 Octree)来减少内存占用,但这些技术会导致复杂的实现,并且现有的数据自适应算法并不能在根本上解决问题,提升的分辨率仍然有限。
因此,基于点云、网格的表示被引入作为体素的替代表示。但是,使用点云表示 3D 图形丢失了点与点之间的连接信息,需要额外的后处理步骤才能从模型中提取出 3D 几何图形。另一方面,现有的网格表示方法通常基于模板网格,通过模板网格的形变来逼近目标图形,因此这种表示不允许任意拓扑。更直接的问题是,这两种方法的点(顶点)数量都受到限制,因此在图形分辨率上也存在限制。
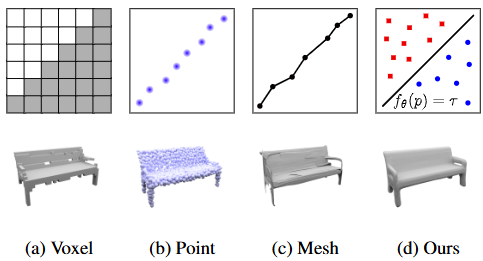
不同的三维数据表示方法
那么,有没有一种既能节省内存,又能从数据中高效推断出任意分辨率的表示形式呢?☝🤓 ,这就是这篇论文所关注的问题。
方法¶
占据函数¶
占据函数 \(f:\mathbb{R}^3\rightarrow \{0,1\}\) 将任意空间坐标 \(p=(x,y,z)\) 映射为 \(0\) 或 \(1\)。其中 \(0/1\) 表示该点在表面内/外。注意占据函数对于不同的曲面 \(C\) 有不同的形式,所以更具体的写法应该是
显然,如果我们有这么一个函数,那么我们就可以依据占据函数来界定整个连续空间中的物体表面,这也就意味着,无限的分辨率。
占据网络¶
看到这基本上就知道作者想要做什么了:训练一个占据网络来拟合占据函数。
思路是把占据情况的预测问题视为一个二分类问题,把离散的占据信息(0/1 分类)转为连续的占据率信息(置信度)来处理,将 3D 表面表示为分类器的连续决策边界。因此后续可以使用占据网络的决策边界来重建曲面(等值面提取)。如前面所述,占据函数与要建模的曲面关联,而网络对 \(C\) 曲面的信息来自于我们对该曲面的观测结果 \(x\),因此网络实际是接受观测值做为输入,形式上,这个二分类网络可以写为:
实现¶
以下是个人理解,与原文有出入 TODO:为文字内容搭配对应的代码
首先考虑用分类网络的方式来实现一个朴素的占据网络:设计一个简单的二分类网络,训练时用空间点坐标 \((x, y, z)\) 做为输入,把该点的占据情况 \(o\) 作为监督信号,进行有监督训练。
这是一套非常标准的方案,但显然存在着问题。比如同样的输入可能会对应不同的标签,同一个坐标可能在上一个图形中被占据,在下一个图形中又没有被占据,导致了训练时存在二义性,这也是为什么前面的公式中我们需要观测信息。对于重建任务,所提供的观测信息包括图像、点云、体素等,可以使用对应模态的编码器对它们进行编码,然后把编码结果作为网络的条件输入,帮助网络区分不同的图形。
那么,怎么把编码结果应用于网络的条件控制?
条件批归一化¶
论文中使用了条件批归一化(Conditional Batch Normalization, CBN)来实现这一点。CBN 是 Batch Normalization 的扩展,它允许 Batch Normalization 层的两个参数(\(\gamma\) 和 \(\beta\))依据外部条件 \(c\) 动态调整,从而实现条件控制。这里我们把编码结果做为条件,通过 CBN 实现条件控制。
潜空间表示¶
TODO: 整理文字
论文还引入了一个编码器 \(g_{\phi}(\cdot)\) 来编码样本信息。一个样本由一组连续空间中的坐标点及其对应的占据信息组成。在 \(p = (x, y, z)\) 坐标的基础上增加一个表示用来占据信息的 \(o\),形式上,这个编码器可以写为:
把 \((p, o)\) 视为随机变量,这个编码器表示了一个条件分布 \(p(z|(p,o))\)。之后参考 VAE 的做法,约束这个分布,使其服从一个简单的先验分布(通常为标准正态分布),方便后续做无条件重建时采样潜在变量,此外,这样做得到的潜在空间在结构上会更平滑一点。
需要注意的是,这块内容实际上没什么用。因为在推理时没有占据率信息,所以实际上无法计算潜在变量,论文中引入这个主要是为了研究占据网络是否可以学习 3D 形状的内存高效表示,同时保留尽可能多的细节。